Welcome to the Smart ETK Android API documentation!¶
1. Smart ETK API General Notes¶
VIA Smart ETK SDK supports the hardware controlling API for GPIO, Watch Dog, and UART (RS-232) modules.
Smart ETK is programmed with the socket IO as the communication between
JAVA and C language to control the hardware modules. We implemented the
board support service such as bss_vab820 to meet the request from Smart ETK
API.
1.1. Compatibility¶
| Model | GPIO | WDT | RTC | WOL | RES | UART | SUS | CEC | I2C | CAN | UPC | DPMS |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| VAB-820 | ✓ | ✓ | × | × | × | ✓ | × | × | × | ✓ | × | × |
| VAB-1000 | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | × | ✓ | ✓ | × | × |
| ALTA DS 2 | × | ✓ | ✓ | ✓ | ✓ | × | ✓ | × | × | × | × | × |
| AMOS-820 | ✓ | ✓ | × | × | × | ✓ | × | × | × | ✓ | × | × |
| ARTiGO A900 | ✓ | ✓ | ✓ | ✓ | ✓ | × | ✓ | × | × | × | × | × |
| Viega | × | ✓ | × | × | × | × | × | × | × | × | ✓ | × |
Legend: GPIO: GPIO support, WDT: WatchDog timer,
RTC is Real-Time Clock Wake-up, WOL: Wake-on-LAN, RES: Restart support,
UART: UART support, SUS: Suspend support,
CEC: HDMI CEC support, CAN: CAN support, I2C: I2C support,
UPC: x, DPMS: DPMS support
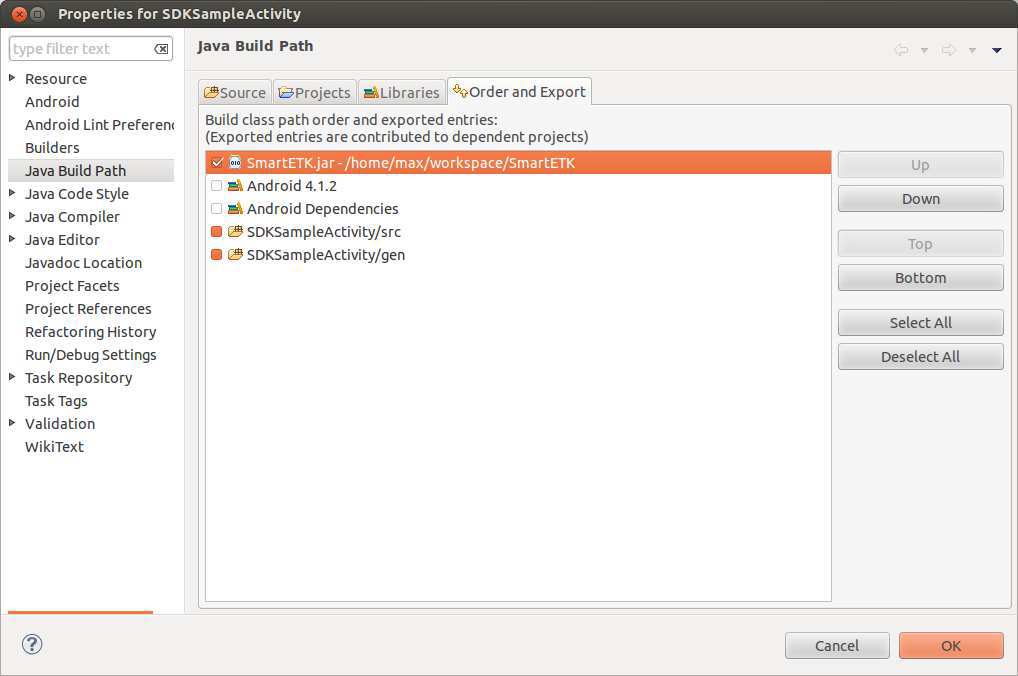
1.2. Installation¶
Open Eclipse IDE and create an Android project. In project properties, import SmartETK.jar by pressing the button “Add External JARs...”.
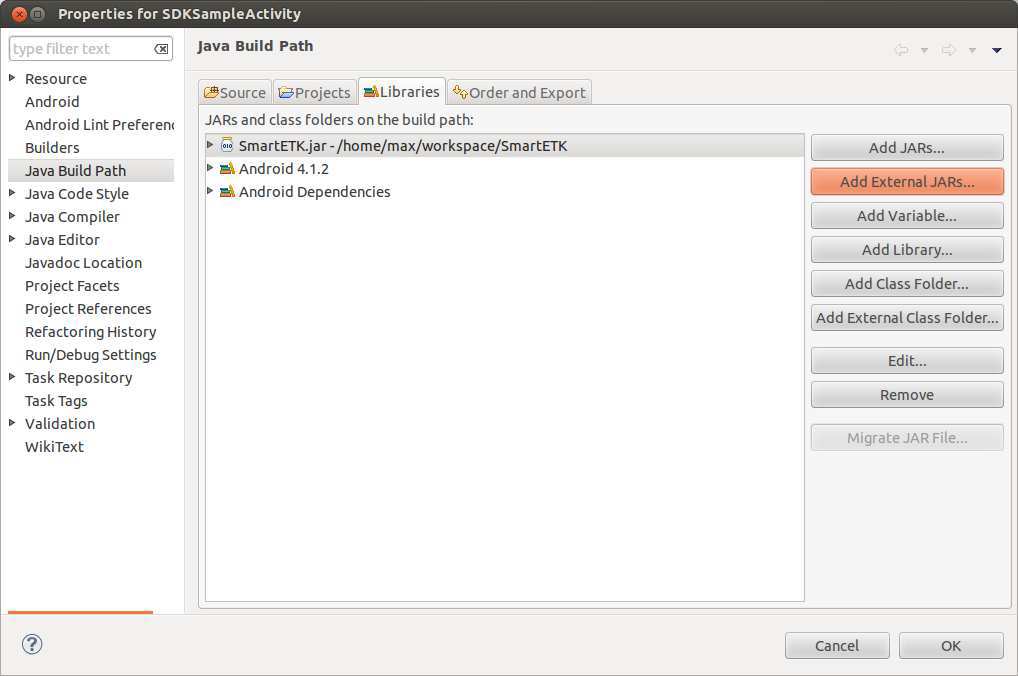
Select “Order and Export” tab, move SmartETK.jar to the top and choose it.
1.3. Permissions¶
Smart ETK is programmed with the socket IO as the communication between JAVA and C language to control the hardware modules, therefore you need to make sure that you have android.permission.INTERNET in AndroidManifest.xml:
<uses-permission android:name="android.permission.INTERNET"/>
2. SmartETK class¶
This class contains general parts used by the rest of the package, such as function return values, and some helper classes.
-
class
SmartETK¶ Helper classes:
-
class
Timeout¶ Timeout configuration, used by
Can.getTimeoutandUart.getTimeout.-
boolean
Enable¶ Enable or disable timeout function
-
int
Timeout¶ timeout value in multiples of 0.1 seconds, accepted range is 0 – 255 (0 - 25.5 seconds)
-
boolean
-
class
2.1. Function Return Values¶
The return values and error codes used by the methods in Smart ETK.
-
static int
S_OK¶ When a function returns the S_OK value, it indicates that the function has successfully completed.
-
static int
E_FAIL¶ When a function returns the E_FAIL value, it indicates that the function has failed to complete.
-
static int
E_VERSION_NOT_SUPPORT¶ When a function returns the E_VERSION_NOT_SUPPORT value, it indicates that the versions of
SmartETK.jarand bsservice are not compatible.
-
static int
E_INVALID_ARG¶ When a function returns the E_INVALID_ARG value, it indicates that the arguments are invalid.
-
static int
E_FUNC_NOT_SUPPORT¶ When a function returns the E_FUNC_NOT_SUPPORT value, it indicates that the function is not supported by this board.
-
static int
E_CONNECTION_FAIL¶ When a function returns the E_CONNECTION_FAIL value, it indicates that the
bsservicedoesn’t respond the request. Please make sure bsservice is running successfully.
-
static int
E_NOT_RESPOND_YET¶ When a function returns the E_NOT_RESPOND_YET value, it indicates that the
bsservicefunction is still running and has not finished yet.
-
static int
E_TIMEOUT¶ When a function returns the E_TIMEOUT value, it indicates that no corresponding data has been received within the period.
-
static int
E_UART_OPENFAIL¶ When
Uart.openreturns the E_UART_OPENFAIL value, it indicates that the UART device can’t be opened successfully. Please make sure the name of the tty device exists.
-
static int
E_UART_NOT_OPEN¶ When a function returns the E_UART_NOT_OPEN value, it indicates that uart object cannot be operated normally. The reason might be that the application doesn’t open uart device before calling other operating function; or it was reset by other uart object.
-
static int
E_UART_ALREADY_OPENED¶ When
Uart.openreturns the E_UART_ALREADY_OPENED value, it indicates that the uart object has been opened. If you need to open other uart device, please call close function to close the current device, then open the other UART again.
-
static int
E_UART_TTY_BEEN_USED¶ When
Uart.openreturns the E_UART_TTY_BEEN_USED value, it indicates that the tty device has been used by other uart object. If you want to use it, you can call reset function to release the resource and open it again.
-
static int
E_UART_BAUDRATE_NOT_SUPPORT¶ When
Uart.setConfigreturns the E_UART_BAUDRATE_NOT_SUPPORT value, it indicates that baud rate is not supported.
-
static int
E_CAN_OPENFAIL¶ When
Can.openreturns the E_CAN_OPENFAIL value, it indicates that the CAN device can’t be opened successfully. Please make sure the name of the CAN device exists.
-
static int
E_CAN_NOT_OPEN¶ When a function returns the E_CAN_NOT_OPEN value, it indicates that can object cannot be operated normally. The reason might be that the application doesn’t open can device before calling other operating function.
-
static int
E_CAN_ALREADY_OPENED¶ When
Can.openreturns the E_CAN_ALREADY_OPENED value, it indicates that the can object has been opened. If you need to open other can device, please call close function to close the current device, then open the other can again.
-
static int
E_CAN_BAUDRATE_NOT_SUPPORT¶ When
Can.setBitratereturns the E_CAN_BAUDRATE_NOT_SUPPORT value, it indicates that bit rate is not supported.
3. Network Class¶
-
class
Network¶ Create a new Network object.
Network m_network = new Network();
-
int
setWakeOnLan(boolean enable)¶ - Enable or disable Network Wake-on-LAN function from suspend mode.
Parameters: - enable (boolean) – enable or disable functionality
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values
-
int
getWakeOnLan(boolean[] enable)¶ Get the status if Network Wake-on-LAN function.
Parameters: - enable (boolean[]) – variable to update with
truefor enabled,falsefor disabled
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values- enable (boolean[]) – variable to update with
-
int
3.1. Network Code Examples¶
3.1.1. Set Wake-on-LAN From Suspend Mode¶
boolean bSetEnable = true;
if(null == m_network) {
m_network = new Network();
}
if(SmartETK.S_OK != m_network.setWakeOnLan(bSetEnable)) {
return false;
}
3.1.2. Get Wake-on-LAN From Suspend Mode Status¶
if(null == m_network) {
m_network = new Network();
}
boolean[] bGetEnable = new boolean[1];
if(SmartETK.S_OK != m_network.getWakeOnLan(bGetEnable)) {
return false;
}
return bGetEnable[0];
4. GPIO Class¶
-
class
GPIO¶ Create a new GPIO object with specified pin ID. Ex: 1, 2, 4, 5, 7, 8, 9, 16.
Parameters: - int pinID – GPIO’s pin ID.
GPIO gpio5 = new GPIO(5);
-
int
setEnable(boolean enable)¶ Enable the specific GPIO pin.
Parameters: - enable (boolean) –
truefor enable,falsefor disable
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- enable (boolean) –
-
static int
GM_GPI¶ Indicates “input” direction for GPIO pin.
-
static int
GM_GPO¶ Indicates “output” direction for GPIO pin.
-
int
setDirection(int direction)¶ Set input/output direction for the specific GPIO pin.
Parameters: Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
getDirection(int[] direction)¶ Get direction state of the specific GPIO Pin.
Parameters: Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
setValue(int value)¶ Set output signal for the specific GPIO Pin.
Parameters: - value (int) – GPIO signal, 0 for logic low, 1 for logic high.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
getValue(int[] value)¶ Get input signal of the specific GPIO Pin.
Parameters: - value (int[]) – GPIO signal, return 0 for logic low, return 1 for logic high.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
4.1. GPIO Code Examples¶
GPIO1, GPIO2, GPIO4, GPIO5, GPIO7, GPIO8, GPIO9 and GPIO203 are the external GPIO pins for user’s own design. An example of setting GPIO1 as input pin and getting its value is shown here.
/* Declare variables to get GPIO5 values */
boolean[] bEnable = new boolean[1];
int[] nDirection = new int[1];
int[] nValue = new int[1];
GPIO gpio5 = new GPIO(1); // Create GPIO1 object
gpio5.setEnable(true); // Enable GPIO1
gpio5.setDirection(GPIO.GM_GPI); // Set GPIO1 as input direction
gpio5.getEnable(bEnable); // Get GPIO1's enable status
gpio5.getDirection(nDirection); // Get GPIO1's input/outputdirection
gpio5.getValue(nValue); // Get GPIO1's input value
An example of setting GPIO5 as output pin and changing its value is shown here.
/* Declare variables to get GPIO6 values */
boolean[] bEnable = new boolean[1];
int[] nDirection = new int[1];
int[] nValue = new int[1];
GPIO gpio6 = new GPIO(5); // Create GPIO5 object
gpio6.setEnable(true); // Enable GPIO5
gpio6.setDirection(GPIO.GM_GPO); // Set GPIO5 as output direction
gpio6.setValue(1); // Set GPIO5's output to high
gpio6.getEnable(bEnable); // Get GPIO5's enable status
gpio6.getDirection(nDirection); // Get GPIO5's input/output direction
gpio6.getValue(nValue); // Get GPIO5's output value
Note
Create GPIO203 by following method:
GPIO gpio203 = new GPIO(16);
5. RTC Class¶
-
class
RTC¶ Create a new RTC (real-time clock) object.
RTC m_rtc = new RTC();
-
static byte
ARG_RTC_MODE_DAY¶ Waking up every day.
-
static byte
ARG_RTC_MODE_WEEK¶ Waking up every week.
-
static byte
ARG_RTC_MODE_MONTH¶ Waking up every month.
-
class
RTCStatus¶ RTC wake up time object
-
byte
Mode¶ wake up mode, one of
ARG_RTC_MODE_DAY,ARG_RTC_MODE_WEEK, orARG_RTC_MODE_MONTH.
-
int
Year¶ year of wake up time, counted from 1900, for example 2015 is iYear = 115
-
byte
Month¶ month of wake up time, between 1 and 12 accepted
-
byte
Day¶ day of the month for wake up time, between 1 and 31
-
byte
Hour¶ hours for wake up time (24h clock), between 0 and 23
-
byte
Min¶ minutes for wake up time, between 0 and 59
-
byte
Sec¶ seconds for wake up time, between 0 and 59
-
byte
-
int
setWakeUpTime(byte Mode, int Year, byte Month, byte Day, byte Hour, byte Min, byte Sec)¶ - Set the wake up time and mode in RTC. The behavior of wake up from suspend mode will start at the wake up time, and it must loop according to the wake up mode.
Parameters: - Mode (byte) – wake up mode, one of
ARG_RTC_MODE_DAY,ARG_RTC_MODE_WEEK, orARG_RTC_MODE_MONTH. - Year (int) – year of wake up time, counted since 1900 for wake up, for example 2015 is iYear = 115 (???)
- Month (byte) – month of wake up time, between 1 and 12
- Day (byte) – day of the month for wake up time, between 1 and 31
- Hour (byte) – hours for wake up time (24h clock), between 0 and 23
- Min (byte) – minutes for wake up time, between 0 and 59
- Sec (byte) – seconds for wake up time, between 0 and 59
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values - Mode (byte) – wake up mode, one of
-
int
getWakeUpTime(RTCStatus RS)¶ Get the wake up time and mode set in RTC.
Parameters: - RS (RTCStatus) – parameter to return the current wake up time and mode
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values
-
int
setEnable(boolean bEnable)¶ Enable or disable RTC wake up function from suspend mode.
Parameters: - bEnable (boolean) –
trueto enable,falseto disable RTC wake up function from suspend mode
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values- bEnable (boolean) –
-
int
getEnable(boolean[] bEnable)¶ Get the status if wake up function from suspend mode is enabled or disabled.
Parameters: - bEnable (boolean[]) – parameter to return
truefor enabled,falsefor disabled
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values- bEnable (boolean[]) – parameter to return
-
static byte
5.1. RTC Code Examples¶
5.1.1. Set RTC Wake Up From Suspend mode¶
boolean bSetEnable = true;
if(null == m_rtc) {
m_rtc = new RTC();
}
if(SmartETK.S_OK != m_rtc.setEnable(bSetEnable)) {
return false;
}
5.1.2. Get RTC Wake Up Status¶
if(null == m_rtc) {
m_rtc = new RTC();
}
boolean[] bGetEnable = new boolean[1];
if(SmartETK.S_OK != m_rtc.getEnable(bGetEnable)) {
return false;
}
5.1.3. Set RTC Wake Up Time¶
The folloing code sets the wake up behaviour to wake up from suspend starting from 2015/5/1, every day at 12:00.
byte Mode = RTC.ARG_RTC_MODE_DAY;
int Year = 2015;
byte Month = IntToByte(5);
byte Day = IntToByte(1);
byte Hour = IntToByte(12);
byte Min = IntToByte(0);
byte Sec = IntToByte(0);
if(null == m_rtc) {
m_rtc = new RTC();
}
if(SmartETK.S_OK != m_rtc.setWakeUpTime(Mode, Year, Month, Day, Hour, Min, Sec)) {
return false;
}
5.1.4. Get RTC Wake Up Time¶
if(null == m_rtc) {
m_rtc = new RTC();
}
m_RS = new RTCStatus();
if(SmartETK.S_OK != m_rtc.getWakeUpTime(m_RS)) {
return false;
}
6. I2C Class¶
-
class
I2C¶ Create a new I2C object with specified bus number, slave address and the length of the offset address.
Parameters: - int I2CBusNum – I2C bus number, for example:
0is fori2c-0bus - byte I2CAddress – I2C slave address, support 7 bits slave addresses
- int OffsetLen – the length of the registers’ offset in number of bytes, accepted values are 0 to 4,
0: no registers,1: 1 byte = 8 bit registers,2: 2 bytes = 16 bit registers,3: 3 bytes = 24 bit registers,4: 4 bytes = 32 bit registers
For example, create an I2C object in I2C bus 1 and I2C slave address 10, and the offset length is 0
I2C m_i2c = new I2C(1,10,0);
Another example, create an I2C object in I2C bus 1 and I2C slave address 52, and the offset length is 2 (16 bit registers).
I2C m_i2c = new I2C(1,52,2);
-
int
read(byte[] Buf, int Offset, int ReadLen)¶ Read data from specified offset with a given length, and store the data in buffer.
Parameters: - Buf (byte[]) – buffer to store the read data
- Offset (int) – the registers’ offset to read from a specified I2C bus number and slave address, accepted values are from 0 to 0x7FFFFFFF
- ReadLen (int) – number of bytes to read, maximum 255 bytes per transfer.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values
-
int
write(byte[] byBuf, int iOffset, int iWriteLen)¶ Write data to a specified offset with a given length.
Parameters: - Buf (byte) – the write buffer
- Offset (int) – the registers’ offset of writing to a specified I2C bus number and slave address, accepted values are from 0 to 7FFFFFFF
- WriteLen (int) – the written data length, maximum 255 bytes per transfer
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values
- int I2CBusNum – I2C bus number, for example:
6.1. I2C Code Examples¶
6.1.1. Initializate I2C¶
Create an I2C object in I2C bus 1 and I2C slave address 52, and the offset length is 2.
int iBusNum = 1;
byte byAddress = IntToByte(52);
int iOffsetLen = 2;
if(iBusNum < 0 || byAddress < 0 || iOffsetLen < 0) {
return false;
}
m_i2c = new I2C(iBusNum, byAddress, iOffsetLen);
6.1.2. Read I2C Data¶
Read data from offset “0” with length “2” bytes, and store data in byRead byte array buffer.
byte[] byRead = new byte[255]
int iOffset = 0;
int iReadLen = 2;
Arrays.fill(byRead, 0);
if(SmartETK.S_OK != m_i2c.read(byRead, iOffset, iReadLen) || null == byRead) {
return false;
}
6.1.3. Write I2C Data¶
Write data to offset 0 with length 2 bytes and data value 0x0101. The written data is stored in byWrite byte array buffer.
byte[] byWrite = new byte[2]
byWrite[0] = 0x01;
byWrite[1] = 0x01;
int iOffset = 0;
int iWriteLen = 2;
if(SmartETK.S_OK != m_i2c.write(byWrite, iOffset, iWriteLen)) {
return false;
}
7. WatchDog Class¶
-
class
WatchDog¶ Create a new WatchDog object.
WatchDog m_watchdog = new WatchDog();
-
int
setEnable(boolean bEnable)¶ Enable or disable watch dog function. SmartETK service will feed the watch dog within a period automatically. Once watch dog function is enabled,
keepAliveneeds to be called within the timeout period set bysetTimeout, otherwise the system will reboot.Parameters: - enable (boolean) –
truefor enable,falsefor disable
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- enable (boolean) –
-
int
getEnable(boolean[] enable)¶ Get enable state of the watch dog function.
Parameters: - enable (boolean[]) – parameter to put the return value of the watchdog status,
truefor enabled,falsefor disabled
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- enable (boolean[]) – parameter to put the return value of the watchdog status,
-
int
keepAlive()¶ Keep watch dog alive to avoid rebooting the system.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
setTimeout(int iTimeout)¶ Set watch dog timeout value
Parameters: - iTimeout (int) – timeout in seconds, accepted values are between
1and128.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- iTimeout (int) – timeout in seconds, accepted values are between
-
int
getTimeout(int[] iTimeout)¶ Get watchdog timeout value.
Parameters: - iTimeout (int[]) – parameter to put the return value of the watchdog timeout in seconds
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
7.1. WatchDog Code Examples¶
7.1.1. Enable WatchDog¶
if(null == m_watchdog) {
m_watchdog = new WatchDog();
}
if(SmartETK.S_OK != m_watchdog.enable(true)) {
return false;
}
7.1.2. Get WatchDog status¶
if(null == m_watchdog) {
m_watchdog = new WatchDog();
}
boolean[] bGetEnable = new boolean[1];
if(SmartETK.S_OK != m_watchdog.getEnable(bGetEnable)) {
return false;
}
return bGetEnable[0];
7.1.3. Keep WatchDog alive¶
if(null == m_watchdog) {
m_watchdog = new WatchDog();
}
if(SmartETK.S_OK != m_watchdog. keepAlive()){
return false;
}
8. UART Class¶
-
class
Uart¶ Create a new UART object.
Uart m_uart = new Uart();
-
int
open(String sDev)¶ Open the specified UART device.
Parameters: - sDev (String) – UART device name, for example
ttyUSB0.
Returns: S_OKif function succeedsReturns: E_UART_OPENFAILif failed to open the deviceReturns: E_UART_ALREADY_OPENEDif the device has already has been openedReturns: E_UART_TTY_BEEN_USEDif the device has been used by other objectReturns: E_*otherwise, see Function Return Values.- sDev (String) – UART device name, for example
-
int
close()¶ Close the UART device that is currently opened.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
class
UartConfig¶ Class to contain the Uart configuration values for
getConfig.-
int
BaudRate¶ baud rate, for example
115200
-
byte
DataBits¶ data bits,
7for 7 data bits,8for 8 data bits
-
byte
StopBits¶ stop bits,
1for 1 stop bit,2for 2 stop bits
-
byte
Parity¶ parity,
0for none,1for odd,2even parity
-
byte
FlowControl¶ flow control,
0for none,1for CTS/RTS flow control
-
int
-
int
setConfig(int iBaudRate, byte byDataBIts, byte byStopBits, byte byParity, byte byFlowCtrl)¶ Configure an already opened UART device.
Parameters: - iBaudRate (int) – baud rate, e.g.
115200 - byDataBits (byte) – data bits, 7 for 7-bit data bits,
8for 8-bit data bits - byStopBits (byte) – stop bits,
1for 1 stop bit,2: 2 stop bits - byParity (byte) – parity,
0for none,1for odd,2for even parity - byFlowControl (byte) – flow control,
0for none,1for CTS/RTS flow control
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- iBaudRate (int) – baud rate, e.g.
-
int
getConfig(UartConfig UC)¶ Get the configurations of the opened Uart device and store them in passed UartConfig Class.
Parameters: - UC (UartConfig) – Uart Configuration
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.Example:
UartConfig UC = m_uart.new UartConfig(); if (SmartETK.S_OK != m_uart.getConfig(UC)) { cleanStatus(); return; }
-
int
setTimeout(boolean bEnable, int iTimeout)¶ Set the timeout of the opened UART device.
If
bEnableis set totrue, the UART read method depends on theiTimeoutvalue. If timeout is set to0then polling read is used, if1-255then the data is read with the corresponding timeout.If
bEnableis set tofalsethen blocking read is performed.Parameters: - bEnable (boolean) –
trueif enable the timeout function,falseotherwise. - iTimeout (int) – timeout value in multiples of 0.1 seconds, accepted range is 0 – 255 (0 - 25.5 seconds)
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- bEnable (boolean) –
-
int
getTimeout(Timeout T)¶ Get the timeout configuration of the opened Uart device and store them in passed Timeout Class.
Parameters: - T (Timeout) – timeout configuration
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.Example:
Timeout T = m_uart.new Timeout(); if(SmartETK.S_OK != m_uart.getTimeout(T)) { cleanStatus(); return; }
-
class
ReturnChar¶ Used by
getReturnChar.-
boolean
enabled¶ Whether the terlmination character function is enabled.
-
byte
returnChar¶ The termination character
-
boolean
-
int
setReturnChar(boolean bEnable, byte byReturnChar)¶ Set the termination character of the opened UART device.
If
bEnableistrue, then read will block until a character equal to``byReturnChar`` is received, or read buffer is full. IfbEnableisfalsethen read will ignore byReturnChar checking when reading data.Parameters: - bEnable (boolean) – enable or disable the termination character function.
- byReturnChar (byte) – the termination character
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
getReturnChar(ReturnChar RC)¶ Get the termination character configuration of the opened Uart device and store them in passed ReturnChar Class.
Parameters: - RC (ReturnChar) – termination character configuration
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.Example:
ReturnChar RC = new ReturnChar(); if(SmartETK.S_OK != m_uart.getReturnChar(RC)) { cleanStatus(); return; }
-
int
readData(int iReadLen, byte[] byRead, int[] iActualLen)¶ Receive data from the opened UART device.
Parameters: - iReadLen (int) – number of bytes to read, maximum 1024 bytes per transfer.
- byRead (byte[]) – pointer to the buffer pointer.
- iActualLen (int[]) – the actual number of bytes received
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
writeData(int iWriteLen, byte[] byWrite)¶ Send the data to the opened UART device.
Parameters: - iWriteLen (int) – number of bytes to transmit, maximum 1024 bytes per transfer.
- byWrite (byte[]) – pointer to data buffer.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
reset()¶ Reset the opened or failed to open UART device. If the uart device has been used by other object,
Uart.openwill return anE_UART_ALREADY_OPENED. The object could call this reset function to release the UART resource and try to open the device again by callingUart.open.Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
8.1. UART Code Examples¶
8.1.1. UART Initialization¶
Note
In the sample code below, mETBaudRate refers to an EditText widget.
private Uart m_uart = null;
m_uart = new Uart();
if(null == m_uart) {
cleanStatus();
return;
}
if(SmartETK.S_OK != m_uart.open((m_sDev = mETDev.getText().toString()))) {
cleanStatus();
return;
}
if(SmartETK.S_OK != m_uart.setConfig((m_iBaudRate = Integer.valueOf(mETBaudRate.getText().toString())),
(byte)8,
(byte)1,
(byte)0,
(byte)0)) {
cleanStatus();
return;
}
8.1.2. Write UART Data¶
Note
In the sample code below, mETWrite is an EditText widget.
if(SmartETK.S_OK != m_uart.writeData(mETWrite.getText().toString().getBytes().length,
mETWrite.getText().toString().getBytes())) {
return;
}
8.1.3. Read UART Data¶
int iReadLen = LENGTH;
byte[] byRead = new byte[LENGTH];
int[] iActualLen = new int[1];
while(SmartETK.S_OK == m_mainThreadUart.readData(iReadLen,
byRead,
iActualLen)) {
if(0 == iActualLen[0]) {
continue;
}
/* Process received byRead byte array ... */
for(int i = 0; i < byRead.length; i++) {
byRead[i] = 0;
}
iActualLen[0] = 0;
}
9. CAN Class¶
-
class
Can¶ Create a new CAN object.
Can m_can = newCan();
-
int
open(String sName)¶ Open the specified CAN device.
Parameters: - sname (String) – CAN device name, for exammple
can0,can1.
Returns: S_OKif function succeedsReturns: E_CAN_OPENFAILif opening device has failedReturns: E_CAN_ALREADY_OPENEDif the object is already openReturns: E_*otherwise, see Function Return Values.- sname (String) – CAN device name, for exammple
-
int
close()¶ Close the CAN device that is currently opened.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
setBitrate(int iBitrate)¶ Set the bitrate of the opened CAN device.
Parameters: - iBitrate (int) – bit rate, e.g.
125000. The default rate is500000
Returns: S_OKif function succeedsReturns: E_CAN_BAUDRATE_NOT_SUPPORTif the given bitrate is not supported.Returns: E_*otherwise, see Function Return Values.- iBitrate (int) – bit rate, e.g.
-
int
getBitrate(int[] iBitrate)¶ Get the bitrate of the opened CAN device.
Parameters: - iBitrate (int) – store the return bit rate
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
setTimeout(boolean bEnable, int iTimeout)¶ If
bEnableis set totrue, the UART read method depends on theiTimeoutvalue. If timeout is set to0then polling read is used, if1-255then the data is read with the corresponding timeout.If
bEnableis set tofalsethen blocking read is performed.Parameters: - bEnable (boolean) –
trueif enable the timeout function,falseotherwise. - iTimeout (int) – timeout value in multiples of 0.1 seconds, accepted range is 0 – 255 (0 - 25.5 seconds)
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- bEnable (boolean) –
-
int
getTimeout(Timeout timeout)¶ Get the timeout configuration of the opened CAN device and store them in passed Timeout Class.
Parameters: - T (Timeout) – timeout configuration
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.Example:
Import com.viaembedded.smartetk.SmartETK.Timeout; Can m_can = new Can(); Timeout timeout = new Timeout(); if(SmartETK.S_OK != m_can.getTimeout(timeout)) { cleanStatus(); return; }
-
int
setLoopback(boolean bEnable)¶ The loopback functionality is enabled by default to reflect standard networking behavior for CAN applications. A local loopback functionality is similar to the local echo e.g. of tty devices.
bEnable = true(if setRecvOwnMsgs() also set to true, it will receive its own msgs after transmit)bEnable = false(no matter setRecvOwnMsgs() set to true or false, it won’t receive its onw msgs after transmit)Parameters: - bEnable (boolean) –
trueto enable loopback,falseotherwise.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- bEnable (boolean) –
-
int
getLoopback(boolean[] bEnable)¶ Get loopback state.
Parameters: - bEnable (boolean[]) – to variable to place the loopback state,
truefor enabled,falsefor disabled
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.Example:
boolean[] bEnable_getlbk = null; if(SmartETK.S_OK != m_uart.getLoopback(bEnable_getlbk)) { cleanStatus(); return; }
- bEnable (boolean[]) – to variable to place the loopback state,
-
int
setRecvOwnMsgs(boolean bEnable)¶ Set
CAN_RAW_RECV_OWN_MSGSflag to decide whether the socket receives frames its own sent or not. As the local loopback is enabled, the reception of the CAN frames on the same socket that was sending the CAN frame is assumed to be unwanted and therefore disabled by default.bEnable = true(ifsetLoopbackset to false, it won’t receive its own msgs after sending Can frame)bEnable = false(default)Parameters: - bEnable (boolean) –
trueif receiving own frames,falseotherwise
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.- bEnable (boolean) –
-
int
getRecvOwnMsgs(Boolean[] bEnable)¶ Get the state of receiving its own sent frames or not.
Parameters: - bEnable (boolean[]) – variable to put results,
trueif function is enabled,falseif not.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.Example:
boolean[] bEnable_recvOwn = null; if(SmartETK.S_OK != m_uart.getRecvOwnMsgs(bEnable_recvOwn)) { cleanStatus(); return; }
- bEnable (boolean[]) – variable to put results,
-
class
CanFilter¶ CAN filter object
-
static final int
PAYLOAD_SIZE¶ 8, payload data size
-
static final int
CAN_INV_FILTER¶ 0x20000000, the filter can be inverted (CAN_INV_FILTERbit is set in can_id)
-
int
iCanID¶ The CAN ID
-
int
iCanMask¶ Valid bits in CAN ID for frame formats
-
static final int
-
int
setFilter(CanFilter[] canFilter, int iLength)¶ The reception of CAN frames can be controlled by defining 0 .. n filters with the
CanFilterobject array buffer. A filter matches, when:[received_can_id] & CanFilter.iCanMask == CanFilter.iCanID & CanFilter.iCanMask
To disable the reception of CAN frames:
setFilter(null, 0);
Parameters: Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
class
CanFrame¶ CAN frame objec
-
static final int
PAYLOAD_SIZE¶ 16, Payload data size
-
int
iCanID¶ 32 bit CAN_ID + EFF/RTR flags
-
final byte[]
byData¶ 8-byte (
byte[8]) frame payload data. The object had been created by byte[8] array buffer. Users can modify data byte array, but cannot modify the object.
-
static final int
-
int
readFrame(CanFrame canFrame)¶ Reading CAN frame from the opened CAN device.
Parameters: - canFrame (CanFrame) – CAN frame object to read
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
writeFrame(CanFrame canFrame)¶ Write a CAN frame to the opened CAN device.
Parameters: - canFrame (CanFrame) – CAN frame object to write
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values.
-
int
10. SystemETK Class¶
-
class
SystemETK¶ Create a new SystemETK object.
SystemETK m_system = new SystemETK();
-
int
reboot()¶ Reboot the machine.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values
-
int
suspend()¶ Suspend the machine.
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values
-
int
10.1. SystemETK Code Examples¶
10.1.1. Reboot the Machine¶
private SystemETK m_system = null;
if(null == m_system) {
m_system = new SystemETK();
}
if(SmartETK.S_OK != m_system.reboot()) {
return;
}
10.1.2. Suspend the Machine¶
private SystemETK m_system = null;
if(null == m_system) {
m_system = new SystemETK();
}
if(SmartETK.S_OK != m_system.suspend()) {
return;
}
11. DPMS Class¶
-
class
Dpms¶ Create a new DPMS object.
m_dpms = new Dpms();
-
int
setDpms(boolean bEnable)¶ Enable or disable the DPMS mode of the HDMI output
Parameters: - bEnable (boolean) –
trueto enable the DPMS mode,falseto disable
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values- bEnable (boolean) –
-
int
getDpms(boolean[] bEnable)¶ Get the status if DPMS function.
Parameters: - bEnable (boolean[]) – parameter to contain the return value,
truefor enabled,falsefor disabled
Returns: S_OKif function succeedsReturns: E_*otherwise, see Function Return Values- bEnable (boolean[]) – parameter to contain the return value,
-
int